This manual is for the Caboodle NodeBrain Kit, a framework for organizing and managing NodeBrain applications. Releases prior to 1.0 are prototypes intended to motivate additional development, but are expected to be complete enough to support a working application that demonstrates how the NodeBrain rule engine can be used.
Release 0.8.17, August 2014
Copyright © 2007–2014 Ed Trettevik <eat@ndoebrain.org>
Permission is granted to copy, distribute and/or modify this document under the terms of either the MIT License (Expat) or NodeBrain License. See the Licenses section at the end of this document for details.
Short Table of Contents
This chapter introduces basic concepts of the Caboodle NodeBrain Kit.
A NodeBrain caboodle is a directory that contains a NodeBrain application constructed from one or more NodeBrain kits.
Kit components are designed to be invoked with a caboodle as the working directory, and reference all other components using a relative path. This means a system may host multiple instances of a given NodeBrain application in multiple caboodles without interference.
Suppose we have two caboodles, /var/mycab1 and /var/mycab2, representing either two instances of application A, or an instance of application A and an instance of application B.
/var/mycab1/
/var/mycab1/adapter/foobar.alarm
/var/mycab2/
/var/mycab2/adapter/foobar.alarm
|
Components of a caboodle must never reference other components of the caboodle using fully qualified names like /var/mycab1/adapter/foobar.alarm. Instead, they always assume the working directory is the caboodle and make a relative reference to other components. This makes them portable from one caboodle to another as illustrated by the following line of a shell script that could run in either of the caboodles shown above.
echo "big problem" | adapter/foobar.alarm |
Caboodles have a defined subdirectory structure upon which NodeBrain kits depend. Each subdirectory has a file management category.
| Management | Description
|
|---|---|
| Shared |
Directory containing components that may be synchronized over multiple instances of a caboodle.
Files in these directories may be placed under version control and checked out to
different users or servers. For a server health monitoring application, as an example, each of several
centrally managed servers may have a caboodle that has identical files in the shared management directories.
An upgrade might be pushed through a common version control repository or a tar file.
|
| Instance |
Directory containing configuration components that make a caboodle unique from other caboodles within the
same application. For a server health monitoring application, some configuration files must
be unique to each server or type of server, and therefor should reside in an instance directory and should not
be synchronized. Where possible, these components should be generated by shared components based
on a minimum set of variables defined for each caboodle.
Keep in mind that components that can adapt to the requirements of a given instance at load time (e.g. NodeBrain rules)
can reside in a "shared" directory.
|
| Dynamic |
Directory containing files that are updated during the normal operation of a caboodle.
Log files are an example. Unlike instance files that make a caboodle behave in a unique way from others
within the same application, dynamic files are unique as the result of what happens in the caboodle.
The application must manage these files to avoid unconstrained growth.
|
The file management category of each caboodle subdirectory is listed below with a short description of how the subdirectory is used.
| Subdirectory | Category and Description
|
|---|---|
| .nb | Instance:
A special directory for use by the NodeBrain interpreter, nb.
If a caboodle.nb file is found in this directory, NodeBrain
sources it at startup. Variables defined here may be used within
shared rule files to adapt to the unique requirements of a particular
instance of an application caboodle.
This is the only directory within a caboodle of which the NodeBrain
interpreter seems to have some awareness. In fact, the NodeBrain
interpreter has no awareness of caboodles. It simply supports
a This directory should not be used by components other than NodeBrain
and node modules.
|
| adapter | Shared:
Commands that adapt a NodeBrain application component
to specific interface requirements.
For example, alarm adapters can be included here to adapt alarms to a particular protocol
or to an external event management system interface.
|
| agent | Shared:
NodeBrain agent scripts.
It is best to manage agents using an agent plan, in which case
the agent script in this directory will be generated for you by
the agent compiler. This directory also has files that identify
the expected state of each agent.
|
| bin | Shared:
Used for commands that do not fall into
the categories for which other directories are defined.
See adapter, agent, exit, and servant directories.
|
| cache | Dynamic:
This directory has subdirectories that contain
files used to cache information for a limited
duration to avoid more expensive lookup, often where lookup may be
relatively frequent.
In cases where deleting the data would impact more than just the performance
hit of having to perform a more expensive lookup, the var directory should
be used instead.
|
| config | Instance:
This directoy may continue configuration files that are unique
to a given caboodle.
However, this directory is deprecated and you
should use the etc directory for all new configuration
files.
|
| etc | Instance:
Configuration files unique to a given caboodle amongst multiple
caboodles synchronizing other components via a version control system.
Since it is not appropriate to version control this file
in a repository shared by other caboodles, it is sometimes
helpful to manage these files using plans with compilers that
can be directed to produce files in this directory based on
symbolic variables and conditional compilation.
See the .nb and plan directories.
|
| exit | Shared:
Commands that communicate a result via their exit code only.
Unlike servants, these commands are normally not designed for
use with NodeBrain. However, their exit code may identity the state
of a monitored element, making it easy to map the exit code
into a NodeBrain assertion.
|
| kit | Shared:
Used to manage kit dependencies. This directory is reserved
for the nbkit command and should not be used by other kit
components.
|
| lib | Shared:
Libraries and Perl modules supporting other kit components.
As with all caboodle components, these components must be
referenced using a relative path to maitain portability of
the caboodle.
|
| log | Dynamic:
Log files for agents and other kit components.
NodeBrain agents normally manage the rotation, compression,
and deletion of their log files. When including other
log files here, remember to provide the necessary management
to avoid filling up your file system. Consider using the
Caboodle agent to manage additional log files unless you
have a more convenient method.
|
| message | Dynamic:
Used by the Message module and other modules using
the NodeBrain Message Log API. Do not use this directory
for other purposed.
|
| msg | Shared:
Used by alarm
adapters (e.g. adapter/mail.alarm) that lookup and include
a description of the alarm
condition and response instructions. Subdirecties
are defined for logical sets of alarms identified by
the first three or four characters of a message
identifier. For example a message CAB0001 would
be described in the CAB subdirectory in a file named
CAB0001.
Within the message set subdirectory (e.g. CAB)
additional files provide header, footer, and missing
file text.
|
| out | Dynamic:
Output files produced by commands issued by
NodeBrain when the output is not redirected.
These files are retained for a few
days for troubleshooting.
|
| pipe | Dynamic:
FIFO files for sending commands to Pipe nodes in NodeBrain agents
or for communicating between other caboodle components.
|
| plan | Shared:
Contains a subdirectory for each plan, including
the XML document, plan relationship files, and normally any files generated
from the XML document by the associated compiler.
In some cases the generated files go to another directory
(e.g. etc) that does not share the same version
control repository used by the plan directory.
|
| queue | Dynamic:
This directory contains subdirectories for Peer module
gueues. This mechanism is deprecated and a future release of
the Peer module will switch to message logs.
NodeBrain message logs
provide a more efficient method of sending events between
agents and are currently supported by the Message module.
See the Message module manual for more info.
|
| security | Instance:
Contains certificates and access lists.
|
| servant | Shared:
Contains servant commands that output
NodeBrain commands to stdout. Commands that
do not conform to this standard belong in
bin, adapter, or exit. Servant commands may optionally
accept commands from NodeBrain on stdin and report
error conditions on stderr.
|
| setup | Shared:
Setup components. A kit may provide components in this
directory for setting up an application.
|
| socket | Dynamic:
Local domain socket files for communication between
NodeBrain processes using the Peer module. This directory
may also be used for communication between other caboodle
components that use local domain socket files.
|
| user | Shared:
Application user files. This directory is for
storing user preferences and other user related
information. There is no recommendation on how to
organized user data in this directory.
|
| var | Dynamic:
Data files used in the normal operation of a NodeBrain application.
Use the cache directory for temporary caching of data obtained from a more authoritive source.
|
| web | Shared:
Web content and scripts for web based tools.
Individual tools should use sub-directories.
For example, the NodeBrain planner uses the "planner"
subdirectory and the Webster modules uses the
"webster" subdirectory by default.
|
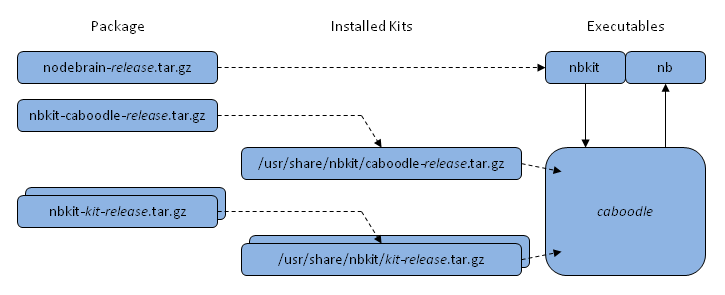
A NodeBrain kit is a collection of components used to construct a NodeBrain application caboodle. Kits are normally installed to /usr/share/nbkit or /usr/local/share/nbkit on development servers where application caboodles are constructed. Kits are not required on test and production servers since their components migrate as part of the application caboodle.
/usr/share/nbkit/kit-release.tar.gz
/usr/share/nbkit/caboodle-0.8.14.tar.gz
|
An installed kit archive file is extracted into a caboodle when the a developer selects the kit for use. Within a caboodle, kits are stored in the kit/use subdirectory. These directories have the same structure as the caboodle itself, but are only referenced for the purpose of constructing the caboodle, they are not involved in application execution.
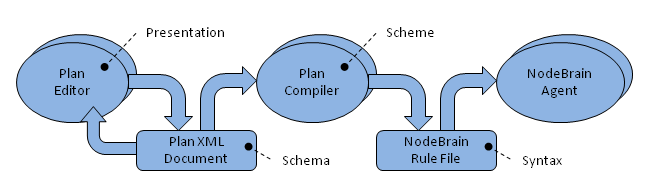
A plan is an abstraction of a set of NodeBrain rules, managed as an XML document using an XML schema that supports self-defining tables. The attributes of a plan have properties that identify how they are used. Attributes may be used as columns of the table, or may be used as single value plan options.

A plan editor is used to update a plan XML document. A plan compiler translates the XML document, following a predefined scheme identified within the document, into NodeBrain rules or configuration files for other components making up an application.
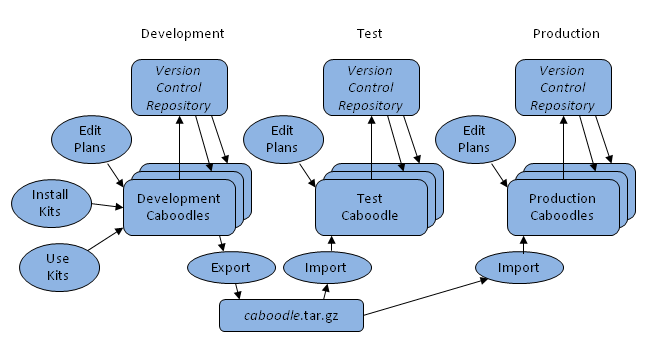
It is common in monitoring applications to have multiple servers that require the same monitoring rules and supporting scripts. The NodeBrain agent is willing to talk to peers, but the concept of a management server does not exist. In situations where it is necessary to centrally manage multiple instances of an application caboodle, there are two basic models to consider.
The first method makes use of a version control repository, where each instance of the application caboodle has a checked out copy of the components you want to replicate. A master caboodle is used for applying changes via a commit and each replica performs an update to get the changes. The replicas need only read access to the repository, while the master needs update permission. This approach can be combined with a web based plan editor for relatively quick distribution of rule changes.
The second method uses a simple tarball to transport updates. This approach is fine when changes are less frequent, and may be required when there is an administrative air gap that rules out the repository option. The export and import functions are provided by the Caboodle Kit to limit replication to components based on the management category of each directory, and to give plans special attention.

The tarball method of replication may be used for component migration through environments, perhaps combined with the repository method for replication within an environment. The export and import operations take special care in handling plans. Plan permissions are managed as separate XML documents called control plans, that only import when new. So permissions to modify plans do not replicate via the tarball method, even when the associated plan document does. In addition, only new plans and plans not previously modified in the target system will import. This makes it possible to elect to manage a plan in a given environment and not to accept updates via migration. This does not prevent migration further down stream, since this is a down stream decision. Plans that are not imported are actually temporarily stored in a kit/plan directory where they are available for manual analysis.
To avoid name collisions in caboodle subdirectories, components and lower level subdirectory names are expected to be in CamelCase, starting with the name of the kit or application that provides the component. For example, components provided by the System NodeBrain Kit start with "System". Components provided by the Caboodle kit violate this standard a bit, but in a way that will not collide with kits following the standard. The caboodle kit provides components associated witht the Caboodle agent, which start with "Caboodle". A more foundational set of nbkit components start with an underscore ("_"), "nbkit", "NBK", or names starting with lower case. You should not emulate these deviations from the standard. Stick with CamelCase names starting with a short identifier of your kit or application.
The Caboodle Kit is released as a GNU style source distribution file, and an architecture independent RPM file, both of which can be downloaded at http://nodebrain.org, with SourceForge.net providing the download service.
When installing from a GNU source distribution release file, follow these steps, adjusting the release number as needed to match the file you download.
# tar -xf nbkit-caboodle-0.8.14.tar.gz
# cd nbkit-caboodle-0.8.14
# ./configure
# make
# make check
# make install
|
When using this method, the kit is installed to /usr/local/share/nbkit/caboodle-0.8.14.tar.gz.
You can override this using ./configure --prefix=/home/foo, which would cause the kit to be
installed as /home/foo/share/nbkit/caboodle-0.8.14.tar.gz.
If on a Linux platform that supports RPM files, you may issue the following command to create a source RPM file and a noarch RPM file to enable native package management.
# make rpm |
When installing from an RPM file, use the following rpm command. The RPM is not architecture dependent because it contains no compiled code, only Perl and NodeBrain scripts, and a few web pages and associated image files.
# rpm --install nbkit-caboodle-0.8.14-1.noarch.rpm |
When using this method, the kit is installed to /usr/share/nbkit/caboodle-0.8.14.tar.gz.
This chapter walks the reader through the initial caboodle setup process as performed on a development system.
After describing the individual steps, a complete example is provided in the last section of this chapter.
The nbkit commands used in this chapter are explained in more detail in the next chapter, Commands.
A caboodle can operate under any account on a system, although it
is often best to run a NodeBrain application using an application account.
When using an application account, an administrator with root would create the application
account first.
# useradd user |
You can skip this step if creating a caboodle to run under your personal account.
Create a directory you will use as your caboodle.
If creating an application caboodle as root, also assign
ownership to the application account. Otherwise, you can skip the
chown command.
# mkdir directory
# chown user:user directory
|
Give your caboodle a name to use with the nbkit command.
$ nbkit caboodle link directory |
Specify the kit you want to use for the caboodle. There may be multiple versions of the Caboodle NodeBrain Kit installed on the server in various locations, so you need to specify the full path. Normally NodeBrain kits will be installed at /usr/share/nbkit/ or /usr/local/share/nbkit/. For example, a normal install of release 0.8.14 of the Caboodle NodeBrain Kit using an RPM will install it as /usr/share/nbkit/caboodle-0.8.14.tar.gz.
$ nbkit caboodle use kit |
The Caboodle agent runs with a NodeBrain identity, which must be established before starting the agent. Issue these commands.
$ nb
> peer.identify Caboodle
> quit
$ echo "declare Caboodle identity;" >> ~/.nb/user.nb
|
Use the following command to start the Caboodle agent. This agent is responsible for alarm distribution and removing some temporary files from the caboodle.
$ nbkit caboodle start Caboodle |
The CaboodleMailAdmin plan subscribes to all alarms initially, and sends email to the local root account.
If that is not appropriate for the caboodle you are setting up, change the administrator email address
as follows.
$ nbkit caboodle edit CaboodleMailAdmin
:%s/root@localhost/email-address/g
:wq
$
|
To verify that alarms are properly sent to the configured email address, issue a test alarm.
$ nbkit caboodle alarm text="CAB0000 This is only a test" |
All the steps described above are illustrated by an example here. This
example assumes an application account and caboodle is being created by root.
# useradd cabby
# mkdir /var/cabby
# chown cabby:cabby /var/cabby
# su cabby
$ nbkit cabby link /var/cabby
$ nbkit cabby use /usr/share/nbkit/caboodle-0.8.14.tar.gz
$ nb
> peer.identify Caboodle
> quit
$ echo "declare Caboodle identity;" >> ~/.nb/user.nb
$ nbkit cabby start Caboodle
$ nbkit cabby edit CaboodleMailAdmin
:%s/root@localhost/john.p.doe@acme.com/g
:wq
$ nbkit cabby alarm text="CAB0000 This is only a test"
|
Here's another example, assuming a user is setting up a caboodle on an existing account that already has other caboodles.
$ mkdir ~/cabby
$ nbkit cabby link $HOME/cabby
$ nbkit cabby use /usr/share/nbkit/caboodle-0.8.14.tar.gz
$ nbkit cabby start Caboodle
$ nbkit cabby edit CaboodleMailAdmin
:%s/root@localhost/john.p.doe@acme.com/g
:wq
$ nbkit cabby alarm text="CAB0000 This is only a test"
|
The nbkit command, an alias for the NodeBrain interpreter nb, is used to launch Perl scripts
that reside in the bin subdirectory of a caboodle. Parameters to nbkit enable operations on
a caboodle and individual agents and plans defined within the caboodle. The general syntax is as follows.
$ nbkit caboodle verb arguments |
In addition to this command line interface (CLI), the Caboodle NodeBrain Kit provides a web interface supporting many of the operations described in this section.
Caboodle links are used to associate a caboodle directory with a short name for use in nbkit commands.
The commands in this section are used to manage these links, which are actually symbolic links within the user's
~/.nb/caboodle/ directory.
The caboodle is given a short name nbkit with a verb of link. In the following example the name cab
is defined as a link to the directory created above. This definition applies only to the account that performs the link command.
$ nbkit cab link $HOME/foobar |
If at any time you decide to abandon a caboodle, use the unlink command.
$ nbkit cab unlink |
All caboodles currently defined for your account can be displayed with either of the following commands.
$ nbkit -c
$ nbkit --caboodles
|
On a development system where the Caboodle NodeBrain Kit is installed, you start a caboodle by creating an empty directory
and giving it a short single word name using the link command.
In the following example, the caboodle directory is created as foobar
in the user's home directory, but it can be anywhere.
$ cd ~
$ mkdir foobar
$ nbkit cab link $HOME/foobar
|
To list installed NodeBrain kits, use one of the following commands.
$ nbkit -k
$ nbkit --kits
|
Now it is time to populate the caboodle with components provided by NodeBrain kits, starting with the Caboodle Kit. The following
example assumes release 0.8.14, but you will adjust the release number based on the installed kits available.
Because the Caboodle Kit provides the logic for most nbkit verbs, including use,
$ nbkit caboodle use kit-archive
$ nbkit cab use /usr/share/nbkit/caboodle-0.8.14.tar.gz
|
The export, import, and upgrade commands may be used to migrate caboodle components.
The export command is used to create an archive of caboodle components in the "shared" management category. This is done to create a backup, or to enable transport to another caboodle, perhaps on another server. Log files and other files considered to be caboodle specific and of no value to similar caboodles are not exported.
$ nbkit caboodle export caboodle-archive
$ nbkit cab export /tmp/foobar-1.0.9.tar.gz
|
Use the import command to update a caboodle from an archive file produced by the export command.
This command will add new "shared" files found on the archive, and will not disturb files in the caboodle that are
not included in the archive.
An import takes additional care in handling plan files, since they may be uniquely managed in an environment.
A plan that has local modifications is not updated from the archive, a message is displayed, and the archived copy is placed in a kit/plan/plan
directory for manual analysis if necessary. This special handling is not applied to other types of components, only plans.
$ nbkit caboodle import archive_file
$ nbkit cab2 import /tmp/foobar-1.0.9.tar.gz
|
Use the upgrade command to update a caboodle from an archive file produced by the export command, including
the removal of "shared" files not found in the archive. This command is used to manage copies of a caboodle, without
allowing for local modifications.
$ nbkit caboodle upgrade archive_file
$ nbkit cab2 upgrade /tmp/foobar-1.0.9.tar.gz
|
Commands in this section operate on NodeBrain agents. An agent is a NodeBrain script that runs as a daemon.
The NodeBrain interpreter running in agent mode responds to an archive command by renaming the current log file by inserting a time stamp, and
then starting a new log file under the original name.
For example, an agent named "Foobar" would normally have a log file named log/Foobar.log.
An archive command renames it to
log/Foobar.YYYYMMDDHHMMSS.log, where YYYYMMDDHHMMSS is year, month, day, hour, minute, and second at the
time of the command.
An agent normally has a rule that issues an archive command daily. However,
the archive verb of the nbkit command may be used to send an archive command to an agent
at other times. This may be useful when troubleshooting if the log file has become too large to view.
$ nbkit caboodle archive agent
$ nbkit cab archive Caboodle
|
The bounce command is used to stop and restart an agent.
This may be done to reload rules after modification.
If the current expected state is set to "up", just like a start command.
$ nbkit caboodle bounce agent
$ nbkit cab bounce Caboodle
|
The check command compares the current state of an agent with the expected state.
If the agent is "down" and expected "up", it is started.
If the agent is "up" and expected "down", it is stopped.
$ nbkit caboodle check agent
$ nbkit cab check Caboodle
|
The connect command is used to invoke the NodeBrain interpreter in interactive mode and
prompt for commands to be issued to an agent. This requires that the agent have a Peer server
node named the same as the agent. This is normal for agents generated by agent plans.
$ nbkit caboodle connect agent
$ nbkit cab connect Caboodle
|
The start command is used to start an agent that is currently "down" and set the
expected state to "up".
$ nbkit caboodle start agent
$ nbkit cab start Caboodle
|
The stop command is used to stop an agent that is currently "up" and set the
expected state to "down".
$ nbkit caboodle stop agent
$ nbkit cab stop Caboodle
|
Commands in this section operate on NodeBrain plans. A plan is an XML document that normally translates into a set of NodeBrain rules or a configuration file based on a model. Compilers are provided to perform this translation. Each plan has a "scheme" that determines which compiler is used.
Most operations performed on plans by commands in this section may also be performed by the NodeBrain Planner web interface.
The compile command is used to convert a plan XML document into a target format, often NodeBrain rules.
$ nbkit caboodle compile plan
$ nbkit cab compile Caboodle
|
Use the disable command to disable a plan, or disable a relationship between two plans.
$ nbkit caboodle disable plan
$ nbkit cab disable CaboodleMailAdmin
|
$ nbkit caboodle disable plan.other.relationship
$ nbkit cab disable CaboodleMailAdmin.CabaoodleNotify.parent
|
The edit command is used to modify a plan.
The XML document is first converted into a temporary file with a less complex format and vi is invoked to edit the file.
After exiting vi, the file is converted back into XML document format.
The XML document is then converted into a target format by the associated compiler.
$ nbkit caboodle edit plan
$ nbkit cab edit Caboodle
|
The enable command is used to enable a plan, or enable a relationship between two plans.
$ nbkit caboodle enable plan
$ nbkit cab enable CaboodleMailAdmin
|
$ nbkit caboodle enable plan.other.relationship
$ nbkit cab enable CaboodleMailAdmin.CaboodleNotify.parent
|
Use list to display a list of configured plans.
$ nbkit caboodle list
$ nbkit cab list
|
The remove command is used to remove a plan
for a caboodle.
$ nbkit caboodle remove plan
$ nbkit cab remove Foobar
|
The rename command is used to change the name of
an existing plan.
$ nbkit caboodle compile plan.newname
$ nbkit cab rename Caboodle.Cab
|
The setup command may be used to display a list of plans
available for setting up in the caboodle.
$ nbkit caboodle setup
$ nbkit cab setup
|
This command may also be used to invoke the assisted setup script for a plan.
$ nbkit caboodle setup plan
$ nbkit cab setup Foobar
|
The show command displays information about a plan, include the scheme
title, and relationships to other plans.
$ nbkit caboodle show plan
$ nbkit cab show Caboodle
|
Use view to browse a plan in configuration file format.
$ nbkit caboodle view plan
$ nbkit cab view Caboodle
|
|
|
Alarm distribution is handled by the Caboodle agent, and required one or more alarm subscription rules. The CaboodleMailAdmin plan is an example of an alarm subscription. This plan can be modified to send email to your email address using the following command. By default the email address is root@localhost. Change it to your email address.
$ nbkit caboodle edit CaboodleMailAdmin |
When you save the change, the Caboodle agent should automatically stop
and restart, unless it is in an expected down state. Before experimenting
with the alarm command in the next section, make sure the Caboodle
agent is up by issuing a bounce command.
$ nbkit caboodle bounce Caboodle |
The alarm command sends a NodeBrain alert to the alarm node
of the Caboodle agent supporting the specified caboodle.
$ nbkit caboodle alarm attribute="value" [ ... ] |
Multiple optional alarm attributes may be specified. Some have default values when not specified. All alarm attributes may be referenced by an alarm subscription, which is required for actual distribution of the alarm.
| Attribute | Description
|
|---|---|
| appl | Specify the name of the application to which the alarm applies.
|
| group | Specify a value that categories the alarm; e.g. "OS", "Database", "Web". The group
attribute is intented to route alarms to a unique group of subject experts. This is
unlike the route attributes which may be used to provide visibility to various inter-
ested recipients.
|
| node | Specify the hostname associated with the alarm. By default, the local hostname is
used.
|
| route | Specify a comma seperated list of routing codes for alarm subscriptions. The codes are
strings that have meaning within a given application. For example, if the caboodle is
a security event monitoring application, a value of "SOC" might be used to indicate the
alarm is intented for the Security Operations Center. Multiple codes may be entered;
e.g. "SOC,NOC".
|
| severity | Specify a level of severity for the alarm. Typical values are "critical", "major",
"minor", "warning" and "info", although you may select alternate values that work bet-
ter in the context of your application.
|
| text | Specify message text that describes the alarm condition; e.g. "Roof flew off the barn".
You may include a message identifier of the form AAANNNN at the start of the text; e.g.
"PWS0125 Roof flew off the barn".
|
This section describes agents provided by this kit. Although there is only one agent for this kit, and not much to say about it, the structure of this document is intended as an example for other kits or applications, some of which will have several agents.
This kit provides an agent called Caboodle, which is responsible for alarm distribution, and may also optionally host web tools like the NodeBrain Planner described later in this document.
Adapers are small scripts that adapt NodeBrain to an application environment based on a model of interaction not defined by NodeBrain, but taking advantage of more general types of interaction defined by NodeBrain. In other words, adapters can fit into models defined by NodeBrain Kits, about which NodeBrain has no awareness.
The Caboodle NodeBrain Kit provides a small set of adapters to get started. Other kits can provide additional adapters. You are advised to think of your application as a kit, even if you don't publish it, and name components using CamelCase, starting with a single word identifier for your application or kit. This is important because caboodle components are stored in a flat name space where collisions would be likely without following this naming standard.
Adapters are stored in the adapter subdirectory of a caboodle and have extensions that identify an adapter type.
Each plan is associated with a scheme, which is a model for converting a table represented as XML, into a set of NodeBrain rules, or a configuration file for another tool. Compilers are adaters that perform this conversion for a given scheme, or you might say they implement a scheme.
These components are named scheme.compiler. The quickest path to understanding a compiler is to study a plan using the scheme. For example, the Caboodle plan uses the _Agent scheme. Looking at both the plan XML document and the generated *.nb file reveals the transformation. If you are comfortable with Perl, a peek at the compiler itself will clarify further.
_Agent.compiler
_Alarm.compiler
_Alarmer.compiler
_Block.compiler
_Config.compiler
_Distribution.compiler
_List.compiler
_Morph.compiler
_Node.compiler
_Package.compiler
_Permissions.compiler
_Policy.compiler
_Rule.compiler
_Subscription.compiler
_Table.compiler
_Translator.compiler
|
Alarm adapters are used to match alarms to specific methods of delivery and enable a variety of formats for a given delivery method. Although most applications need to send alarms via a variety of the methods, such as SMTP, SNMP traps, syslog, and command interfaces to event management or ticketing systems, the initial release of this kit only provides an adapter for mail.
_Mail.alarm
_Mail.form
|
Plans that use the _Subscription compiler allow for the specification of a form and alarm adapter.
By addding more form and alarm adapters you increase the options for alarm subscriptions.
Servants connect NodeBrain rules to an application environment using a method of interaction prescribed by, and fully support by, NodeBrain. This sets them apart from adapters, which interact with NodeBrain indirectly, based on a model unknown to NodeBrain.
Although servants are critical to many NodeBrain applications, the initial release of the Caboodle NodeBrain Kit provides no servants. See the System NodeBrain Kit for examples.
Plans are XML documents that represent a set of NodeBrain rules, or other configuration files, as a table with options. This kit provides two sets of plans. The first set have names starting with an undercore ("_") and provide an initial folder structure and plans used as models for creating new plans. The second set have names starting with "Caboodle" and implement the actual application provided by this kit. Other kits and applications are expected to name both model and application plans in CamelCase starting with the name of the kit or application. The use of ("_") is unique to the Caboodle Kit.
Folder are provided to aid in navigation when managing plans using the NodeBrain Planner.
| Plan | Purpose
|
|---|---|
| _Home | Top level folder.
|
| _Admin | Plan of interest primarily to application administrators.
|
| _Admin/_Model | Plans used as models for new plans. Any plan can server as a starting point for creating a new plan.
However, plans in the _Model folder typically have no other purpose. These plans are included in a pull down menu of
model plans when creating a new plan using the NodeBrain Planner web interface.
|
| _Admin/_Schema | Examples of supported XML schemas (Folder and Table).
|
| _Admin/_Scheme | Model for each supported scheme for which a compiler is provided. This is a proper
subset of the plans in the _Model folder.
|
| _Admin/CaboodleKit | Enables navigation to all application plans provided by this kit.
|
| _Alarms | Plans that generate an alarm identified by the plan name. This is intended as a single
place to find all alarms, although alarms will be found under other folders and plans as well.
|
| _Planner | Plans of interest to users called "planners", who are responsible for updating the content of plans,
but not the design of plans.
|
| _Subscriptions | Alarm subscription plans.
|
Plans in this section are used as a model for creating new plans. They are children of the _Model folder.
| Plan | Purpose
|
|---|---|
| _Agent | Create an agent. This plan is like a _Block plan, but volunteers some addition rules appropriate for all agents.
|
| _Alarm | Create an alarm. Works with the CaboodleAlarmer plan to generate a flood protected alarms.
|
| _Alarmist | Create a mulitple condition alarm. Works with the CaboodleAlarmer plan to generate a flood protected
alarm covering multiple conditions, each identified by a signature name.
|
| _Block | Create a set of rules organized into blocks that can be enabled or disabled. These rules are represented in NodeBrain rule syntax.
|
| _Config | Create a configuration file for a non-NodeBrain application. This is like a _Block plan, in that it has blocks that can be enabled and disabled, but it also supports block conditions interpreted by NodeBrain for selective inclusion of blocks in the generated file.
For NodeBrain rules, the _Block plan should be used instead, because the conditions can be specified within the NodeBrain syntax and applied at agent startup instead of plan compilation time.
|
| _Folder | Create a new folder plan. Plans are stored in a flat namespace, unlike a multi-level directory system.
All plans may have multiple parent plans and multiple child plans. This means every plan is effectively a folder of child plans,
but a _Folder plan has no other purpose than to provide access to a set of child plans.
|
| _List | Create a list of assertions for a node using a module that accepts assertions of tuples (e.g. Tree, and Cache).
|
| _Macro | Create a macro for use by other plans.
|
| _Morph | Create a non-NodeBrain application configuration file using NodeBrain conditions and symbolic substitution.
These plans are used similar to _Config plans, but where symbolic substitution is required in addition to conditional use of blocks.
|
| _Node | Create a node.
|
| _Package | Create a package of plans with control of source parameters and the order children are sourced.
|
| _Policy | Create a set of rules.
|
| _Rule | Create a single rule.
|
| _Subscription | Create an alarm subscription.
|
| _Table | Create a plan using the table schema without generating code.
A table plan may be used as a configuration file to an application component that
accesses the XML document directly. A table plan can also be used to prepare a
model plan for a new scheme. After formulating the model plan a compiler can be written
and the plan scheme can be changed to use the new compiler.
|
| _Translator | Create a translator node and translator. The translator may be used by other nodes as well.
|
| _TypeList | Create a list of single attribute turple assertions (see _List above) where the attibute is called "Type".
This is a simple example of a _List plan, provided because use of _List requires modification of the plan table attributes
to adapt to your requirement. The _TypeList plan is an example of a very minor modification.
|
Plans in this section provide a minimal application that can be used to manage alarm distribution and an optional web interface for administrators.
| Plan | Purpose
|
|---|---|
| Caboodle | Agent responsible for alarm distribution and hosting of an option web server for tools
|
| CaboodleAccess | User permissions for access to the optional NodeBrain Planner
|
| CaboodleAlarm | Alarm distribution plan used by Caboodle agent to implement alarm subscriptions
|
| CaboodleAlarmAttributes | Alarm attributes managed separately to symplify replacing CaboodleAlarm
|
| CaboodleAlarmDelivery | Alarm delivery macro used by alarm subscriptions
|
| CaboodleAlarmer | Alarm handler with flood protection
|
| CaboodleConfig | Configuration of web heading for the optional NodeBrain Planner
|
| CaboodleFilter | Access filter for the NodeBrain Webster node module when used as a web server
|
| CaboodleMailAdmin | Alarm subscription for caboodle administrator
|
| CaboodleProfile | Optional plan for managing a caboodle profile (.nb/caboodle.nb)
|
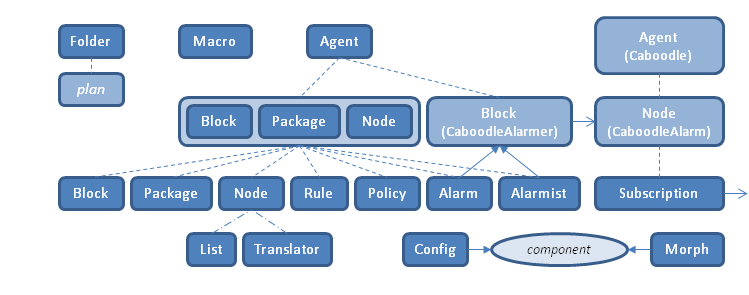
The figure below shows how plans can be organized based on their scheme.
An agent plan is the top level plan for an agent, while a batch or interactive script would start with a block, package, or node plan.
A node plan provides a single node, while a block or package plan can provide multiple nodes. Children of these types of plans are listed below them.
List and translator plans are often referenced by a node directly instead of being sourced in as a child plan.
Alarm and alarmist plans provide a method of generating alarms to be handled by CaboodleAlarmer which provides flood control and an interface to the Caboodle agent for distribution based on subscriptions.
Morph and config plans normally stand alone because they generate configuration files for component other than NodeBrain. Macro plans are often managed as a resource loaded by the %use directive, so it is shown standing alone at at the top level. However, macros may also be defined within a lower level context, and may be a child to another plan.
The NodeBrain Planner is a web interface for editing plan documents in a caboodle, as a way of managing NodeBrain rules. This interface is provided by a Perl CGI script that you can use with an Apache web server, or with the Webster module provided with NodeBrain. Depending on your application, it may be best only to use this interface on a development platform. However, some applications require dynamic rule changes in a production environment, in which case you may elect to use this inferface in production as well as development.
Use of the NodeBrain Planner is optional. You may elect to manage a caboodle using the
nbkit command at a shell prompt, or use the Planner and nbkit command in combination.
Because the NodeBrain Planner enables control of a caboodle and the account running the Planner, it is important to authenticate administrators using the Planner and set appropriate permissions. Authentication is performed by the web server and web browser using X509 certificates and mutual verfication.
Both client and server require a certificate, private key, and at least one trusted cerfiicate that has signed the certificate of the peer. On the server side, these files can be stored in the security subdirectory of your caboodle as follows.
security/ServerCertificate.pem
security/ServerKey.pem
security/TrustedCertificates.pem
|
You can obtain the certificates from a trusted certificate authority or create your own using openssl. The is plenty of information on the web to reference. If you have a copy of the NodeBrain source package, you can also start with the Webster NodeBrain Module tutorial.
The CaboodleAccess plan is used to control Planner permissions. To make yourself an
administrator, edit the plan by issuing the following edit command.
$ nbkit caboodle edit CaboodleAccess |
This will drop you into vi on the plan, after first converting it from XML format to
a more vi friendly format called "cfg". Once you get the web interface working, you will be able
to use it for subsequent changes to the CaboodleAccess plan.
In "cfg" format, table rows are expressed in blocks starting with "]" in column one, and attribute names starting in column two, followed by a colon, ":", and a value the first two blocks shown below, are the last two blocks of the file when you first edit it. Copy the first of these to make a third as the bottom of the file as illustrated. The UserId must match the common name (CN) in your browser certificate, and the Role must be "admin" to give you full control of all the plans in the caboodle.
]
UserId: admin
Role: admin
Name: Administrator
Email: root@localhost
Phone: Unknown
Department: Unknown
Location: Unknown
]
UserId: guest
Role: guest
Name: Guest
Email: root@localhost
Phone: Unknown
Department: Unknown
Location: Unknown
]
UserId: certificate-CN
Role: admin
Name: your-name
Email: your-email-address
Phone: Unknown
Department: Unknown
Location: Unknown
|
When you :wq out of vi reply y when asked if you want to compile the plan.
If you are familiar with the Apache web server, you may prefer to run the NodeBrain Planner
under Apache. An outline for creating a virtual host for a caboodle is shown below.
Replace Caboodle with your caboodle directory. You may use a different port number, and
may place the SSL certificate and key files in a different location under different names.
The important elements of this outline to follow are the DocumentRoot, the Include
to control access, and the options related to CGI scripts.
Listen 443
<VirtualHost *:443>
DocumentRoot "Caboodle/web"
...
SSLEngine on
SSLCertificateFile Caboodle/security/ServerCertificate.pem
SSLCertificateKeyFile Caboodle/security/ServerKey.pem
SSLCertificateChainFile Caboodle/security/TrustedCertificates.pem
...
<Location />
SSLRequireSSL
Include Caboodle/plan/CaboodleAccess/CaboodleAccess-apache.txt
</Location>
...
<Files ~ "\.cgi$">
SSLOptions +StdEnvVars
</Files>
...
<Directory "Caboodle/web">
Options ExecCGI ...
...
</Directory>
...
</VirtualHost>
|
The NodeBrain Planner must run as the user owning the caboodle.
This means you must run Apache under this user, or use the suexec feature
of Apache to switch users. This means you will use the User global
directive, or the SuexecUserGroup directive in the virtual host.
Refer to Apache HTTPD Server documentation online for additional information on configuring virtual servers using SSL, CGI scripts, and suexec.
The Webster NodeBrain Module may be used as the web server hosting the NodeBrain Planner. Be careful when using this option, because it introduces some remote control features only appropriate for administrators of the caboodle. If you want to make the Planner available to users you don't want to also have administrative rights to the caboodle and the application account, you should use the Apache option for those users.
To use this option, create a file called AccessList.conf in the security subdirectory of your caboodle. The file needs only one line starting with "a," followed by the common name (CN) in your browser certificate, followed by a semi-colon, and optionally a comment if the CN is not self documenting. You may add additional lines if you want to have multiple administrators.
a,CN; # comment |
Next, enable the webster node in the Caboodle agent.
This is done using the nbkit edit command.
$ nbkit caboodle edit Caboodle |
You will be dropped into vi and the bottom of the file will look like the following
block. A disabled block starts with "]!". To enable the block, remove the "!". If port
49443 is used on your server, you can change to an unused port.
]!
Code{
# Webster - Tiny Web Server
define webster node webster;
webster. define uri cell "https://0.0.0.0:49443";
webster. define Config cell "etc/CaboodleConfig.conf";
webster. define Filter cell "plan/CaboodleFilter/CaboodleFilter.nb";
}
|
When you :wq out of vi, respond y when asked if you want to compile the plan.
Your Caboodle agent should automatically start, or restart if it was already running.
Now just point your browser to https://hostname:49443/planner/Planner.cgi, using your alternate port if you changed it. If you have more than one certificate installed in your browser, select the one that will be trusted by your server. This means, the one with the common name (CN) specified in your security/AccessList.conf file and signed by the private key of a trusted certificate in your security/TrustedCertificates.pem file.
The additional functionality provided by this option may be accessed via the [Webster] item in the upper right menu bar. Use the upper left menu bar for [Bookmarks], [Directory], and [Command] functions. Return to the Planner by selecting [Planner] in the upper right menu bar.
The [Command] option enables remote execution of NodeBrain commands in your Caboodle agent. However, a firewall restricts the commands you can issue via this interface. You manage this firewall using the CaboodleFilter plan.
A plan is normalled stored as an XML document, but may also be represented temporarily in a line editor format, or Planner web display format. This chapter introduces these formats. In later editions, more detail will be provided. For now, the formats are illustrated by example.
The XML schema for a plan document is relatively simple as shown below using the CaboodleMailAdmin plan as an example.
<?xml version='1.0'?>
<plan scheme='_Subscription' schema='table' version='0.8'>
<description name='CaboodleMailAdmin' title='Administrator Alarm Subscription'>
This plan specifies alarm subscription conditions.
</description>
<guide>
</guide>
<table>
<attributes>
<attribute id='1' time='1362271999' user='admin' name='address'
title='Email address of subscriber' type='text' for='opt'>root@localhost </attribute>
<attribute id='2' time='1362271999' user='admin' name='method'
title='Type of alarm adapter' for='opt'>_Mail</attribute>
<attribute id='3' time='1362271999' user='admin' name='form'
title='Adapter to format alarm content' for='opt'>_Mail</attribute>
<attribute id='4' time='1362271999' user='admin' name='term'
title='Name associated with condition'/>
<attribute id='5' time='1362271999' user='admin' name='expression'
title='NodeBrain cell expression based on alarm attributes' type='cell'/>
</attributes>
<rows>
<row id='1' time='1362271999' user='admin'><cell id='4'>all</cell><cell id='5'>1</cell></row>
</rows>
</table>
<history>
<change id='1' time='1362271999' user='admin' update='Full plan update' reason=''/>
</history>
</plan>
|
The line editor format is designed to be easy to edit with a line editor. Column one of each line is special in this format. Compare the following representation of the CaboodleMailAdmin plan to the XML representation above. Change history information is not currently included in this format, and will be dropped when a plan is converted back to XML document format.
.scheme: _Subscription
.title: Administrator Alarm Subscription
.purpose{
This plan specifies alarm subscription conditions.
}
.guide{
}
)table
.address: root@localhost
title: Email address of subscriber
type: text
for: opt
.method: _Mail
title: Type of alarm adapter
for: opt
.form: _Mail
title: Adapter to format alarm content
for: opt
.term
title: Name associated with condition
.expression
title: NodeBrain cell expression based on alarm attributes
type: cell
>
term:
expression:
]
term: all
expression: 1
|
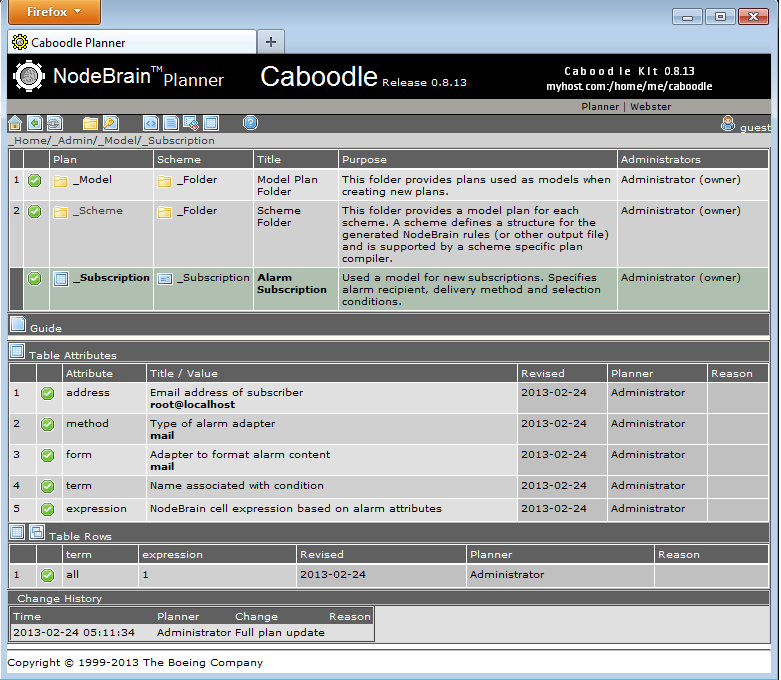
Plans are converted from XML to HTML format by the Planner. For authorized users, additional HTML elements are included to enable plan editing. For more information on this format, consult the online help provided by the Planner.
The HTML format uses icons created by Mark James at http://www.famfamfam.com.
NodeBrain is free software; you can modify and/or redistribute it, including this document, under the terms of either the MIT License (Expat) or the NodeBrain License.
MIT License
Copyright © 2014 Ed Trettevik <eat@nodebrain.org>
Permission is hereby granted, free of charge, to any person obtaining a copy of this software and associated documentation files (the "Software"), to deal in the Software without restriction, including without limitation the rights to use, copy, modify, merge, publish, distribute, sublicense, and/or sell copies of the Software, and to permit persons to whom the Software is furnished to do so, subject to the following conditions:
The above copyright notice and this permission notice shall be included in all copies or substantial portions of the Software.
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE SOFTWARE.
NodeBrain License
Copyright © 2014 Ed Trettevik <eat@nodebrain.org>
Permission to use and redistribute with or without fee, in source and binary forms, with or without modification, is granted free of charge to any person obtaining a copy of this software and included documentation, provided that the above copyright notice, this permission notice, and the following disclaimer are retained with source files and reproduced in documention included with source and binary distributions.
Unless required by applicable law or agreed to in writing, this software is distributed on an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.